Vélez, Andrade, Guevara
IMPLEMENTATION OF
TANGENTIAL
KICKING FOR
A
SOCCER
ROBOT
Paulina Vélez
1,2
, Diego Andrade
1
, Gustavo Guevara
1
Facultad de Ingeniería
1
, Universidad Nacional de Chimborazo - UNACH, Ecuador
Escuela Técnica Superior de Ingeniería
2
, Universidad de Sevilla, España
e-mail: paulinaandreavelez@gmail.com
R
esumen
A
bstract
which depends on the design of each user / developer.
It is managed at distance by different methods, such as
radio frequency control and its related technologies, e.g.
Bluetooth and WIFI (2).
The design can be limited to different rules that usually
have each contest. The propulsion system can be
elaborated with micro-motors or others types of engines,
such as servomotors and bushels. All of them are driven
by a Motor-Driver controller (3), commonly interpreted as H.
Bridge based on the geometric plane.
Introduction
A soccer robot
electronic device
a remotely-operated
designed to perform
movements in two dimensions. In
addition, the present approach has 4
Degrees Of Freedom (DOF) (1). It is
used in robot soccer competitions with
two teams of three members each one.
The robot can have two or more wheels,
55
This paper describes the development of a soccer robot, which integrates a prototype of shooting
based on the principle of the tangential curve, leading to perform such action into an arch. This effect
is caused by the tangential acceleration formed by the angle at the kick, and leads the object to move
over an area with different optimal positions for shooting. The kick is aimed at increasing the number
of the robot degrees of freedom while improving the efficiency of shooting, thus facilitating control
of the device for the tele-operator at crucial moments where the described mechanism is required.
Tele-operation control is achieved by Bluetooth technology and allows the device to make different
movements, e.g. go forward, turn to the left or right, go back and eventually kicking, all of them
referred to odometry principles that corroborate the theoretical performance of the design. To sum
up, this robot design provides the teleoperator with a more effective and simpler shooting, compared
to a conventional model.
keywords: soccer robot, tangential kick, tele-operated robot, odometry
Este artículo describe el desarrollo de un robot jugador de futbol, el cual integra un prototipo de
disparo o patada, basado en el principio de la curva tangencial, el cual genera un arco para realizar
el disparo. Este efecto se produce debido a la aceleración tangencial que se genera debido el ángulo
de la patada o disparo, y lleva el objeto a moverse a través de una zona con diferentes posiciones
óptimas para disparar. La patada alcanzada incrementa el grado de libertad del robot y a su vez
mejora la eficiencia de tiro, facilitando el control del robot por parte del teleoperador en momentos
críticos durante el juego. El control de teleoperación se consigue a través de un dispositivo móvil el
cual esta conectado al robot mediante bluetooth. El control que el operario realiza permite realizar
movimientos adelante-atrás, girar hacia izquierda y derecha, patear la bola. Estos movimientos se
rigen a los principios de odometría que corroboran el rendimiento teórico del diseño. Resumiendo,
este diseño proporciona al teleoperador aumentar su porcentaje de aciertos (goles) luego de ejecutar
un tiro, esto comprándolo con un modelo convencional.
palabras claves: robot jugador de fútbol, patada tangencial, robot teleoperado, odometría
A system of tangential kicking is a method to optimize
point shooting between a soccer robot and its rivals
(obstacles to beat), which has demonstrated effectiveness
when being implemented (4). By applying this concept,
the robot is able to solve a state of high speed by a route
planning and within a specific area of shot. The objective
is chosen according to the principle of least variation.
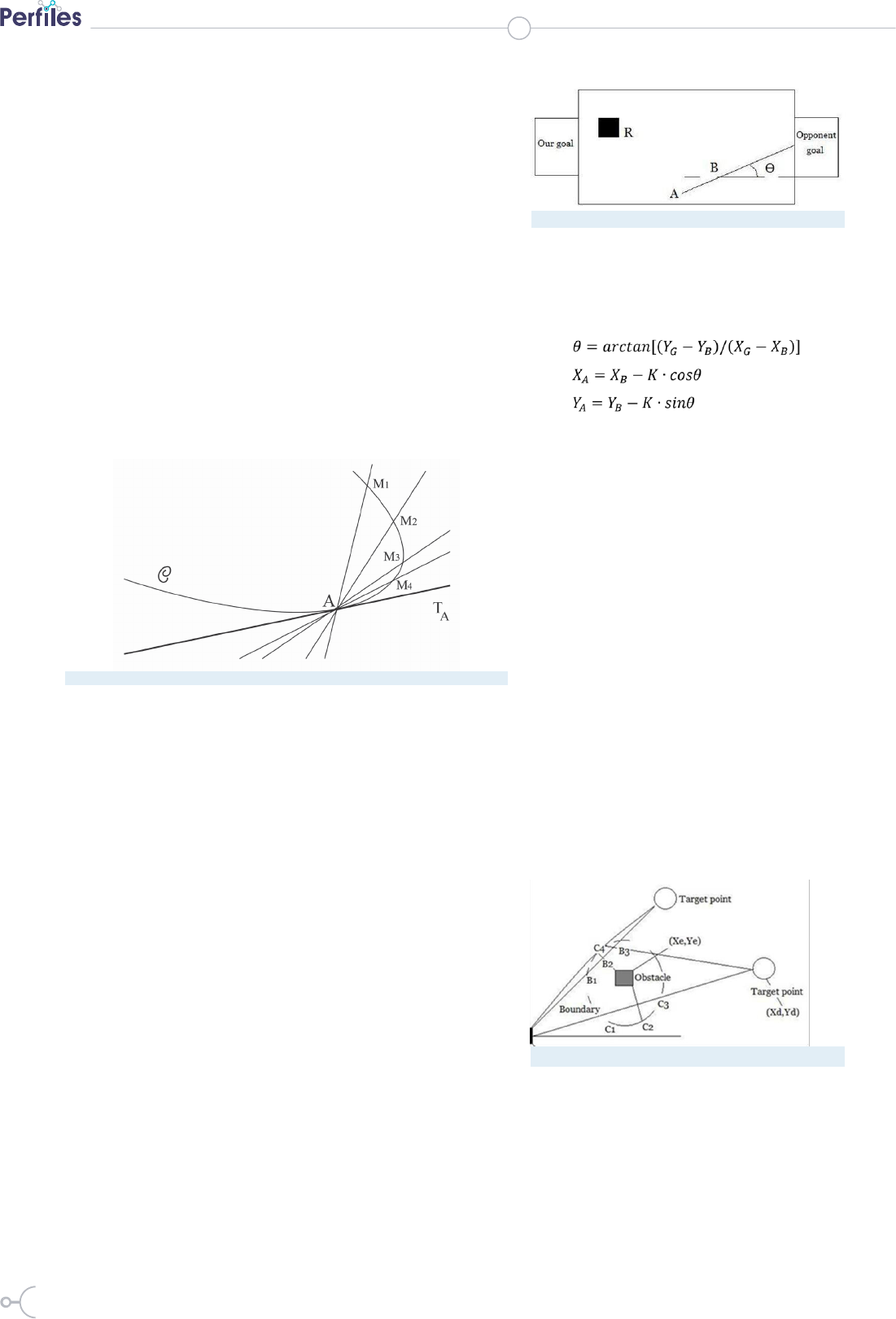
Step 1. The robot shooting points must
be calculated. In order to do so, the
following equations must be computed:
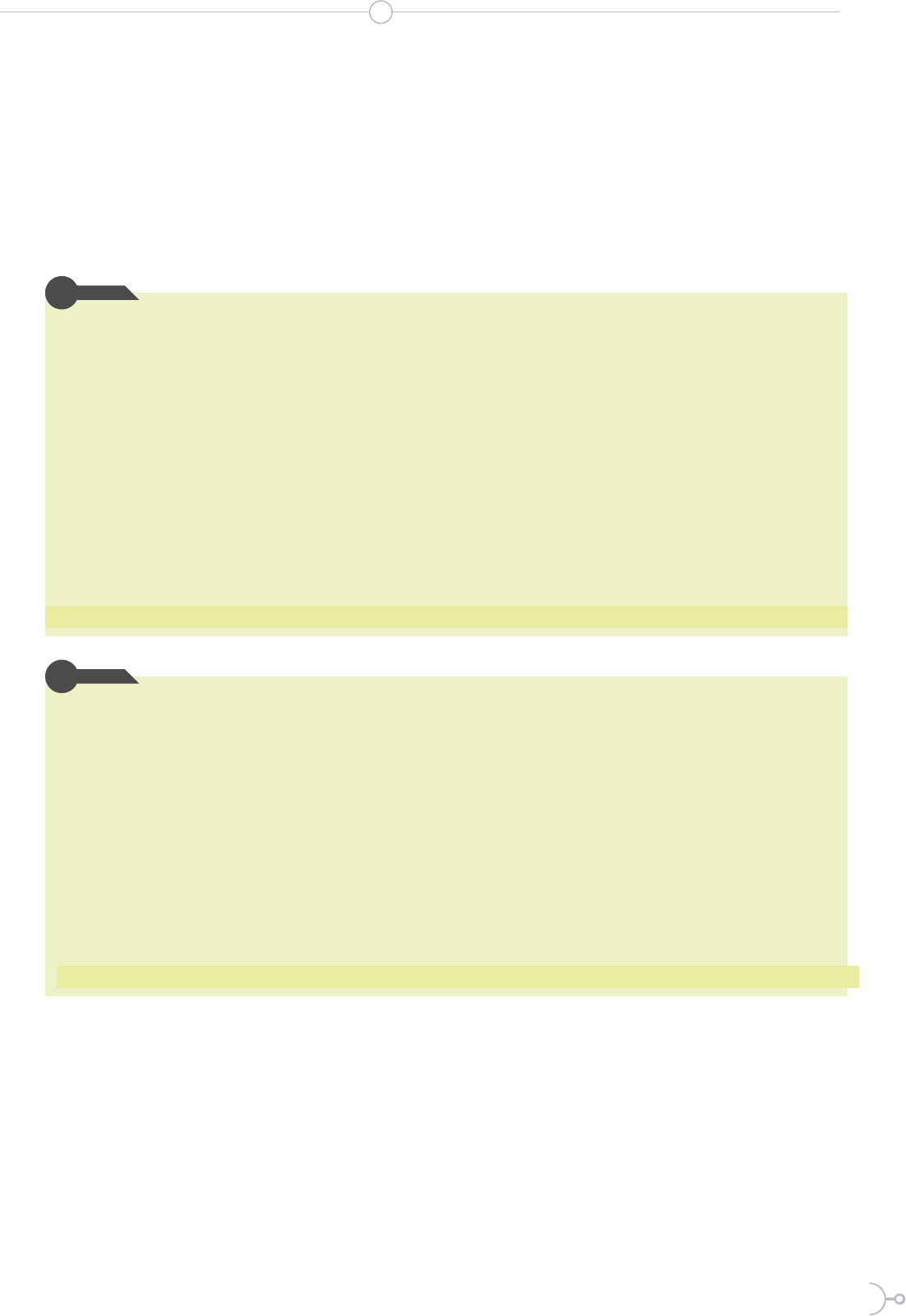
The trajectory takes place along a circular arc path, i.e. the
formation of the tangential shots is performed between
the original angle of the robot and the transition from the
straight line of curve, after the shot is made. It is worth
mentioning that the oscillation induced by the coup at
the robot is deleted with original angle adjustment. The
tangential cases are shown in Figure 1 (4).
Step 2. The robot R should move to
point of shooting A.
Step 3. The robot R adjust the angle of
shooting
Step 4. The robot R kicks the ball
Step 5. Return to step 1.
Tangential path shooting
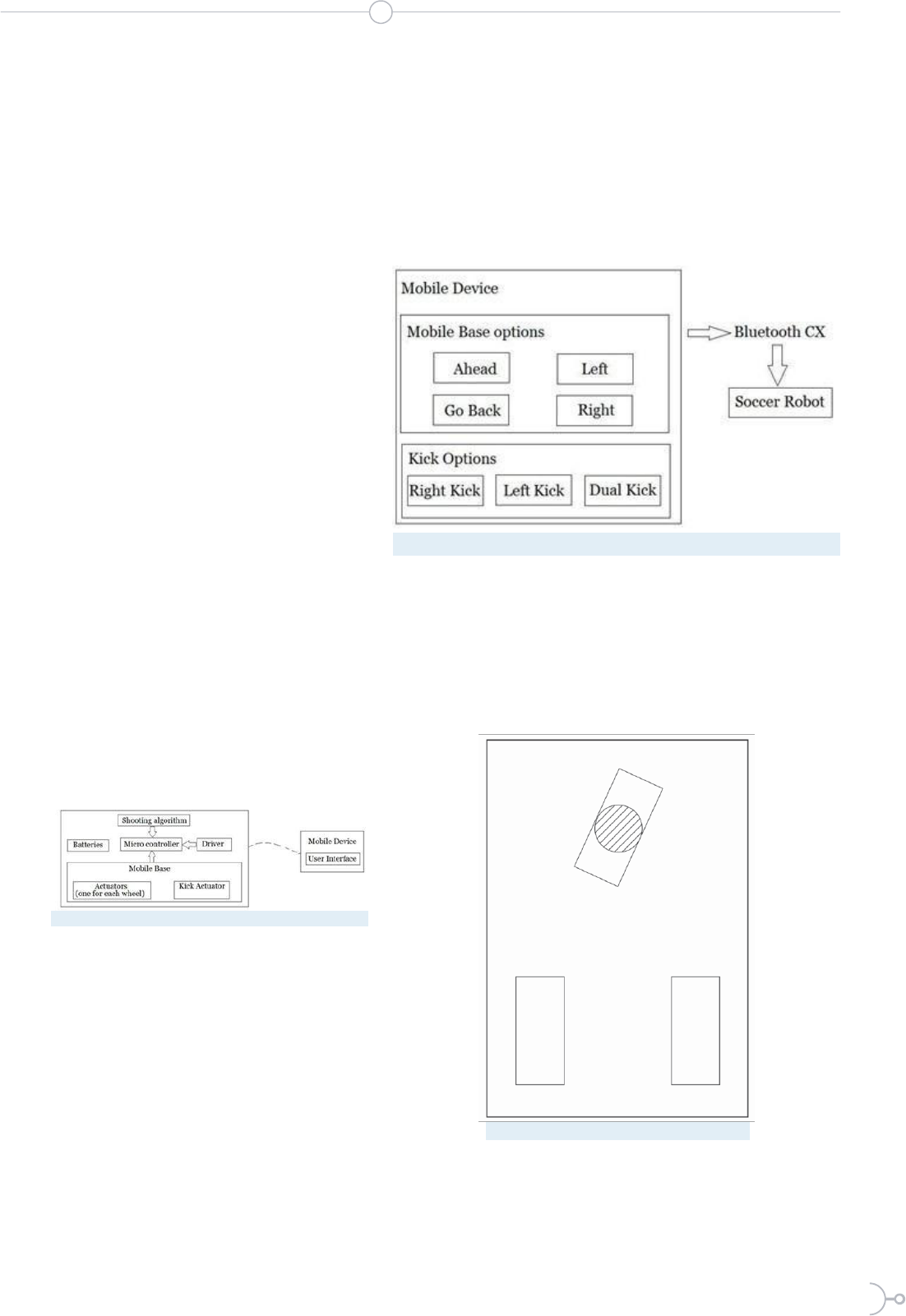
This algorithm is useful in complex
game environments, which has several
obstacles, so both a path planning and
a strategy are required. Figure 3 shows
the path generation. The steps below
are required to apply the tangential path
shooting algorithm (4), as it is shown in
Figure 3.
Implementing this kicking system provides the tele-ope-
rator with a better control of the shot during a game ses-
sion, thus increasing the robot chances of scoring a “goal”
in the opposite arch. A greater number of trajectories at
different ways of shooting are generated, by means of
the tangential trajectory and the semi-effect of rotation,
affecting the impact and displacement.
Methodology
Simple path shooting
A
specific
contact kicking point of the ball is usually used
at the robot mechanism, which is strategically designed
so that, at the time of the contact, the ball would meet
the principle of the tangential trajectory. The following
5 steps are required to apply the simple path shooting
algorithm (4), as it is shown in Figure 2.
Step 1. Set the obstacle as the center of
the equation and the parameter W as it
radius. Calculate the shortest path and
intersect the circumference at the points
C1 and C3. Set the shortest vertical path
over the center of the obstacles and
56
Figure 3. Tangential Path shooting.
Figure 1. Cases of a tangential curve
Figure 2. Simple path shooting.
ISSN 1390-5740 Número 15 Vol. 1 (2016)
ISSN 2477-9105
Vélez, Andrade, Guevara
calculates the intersection of the points
C2 and C4 between the vertical path and
the circumference.
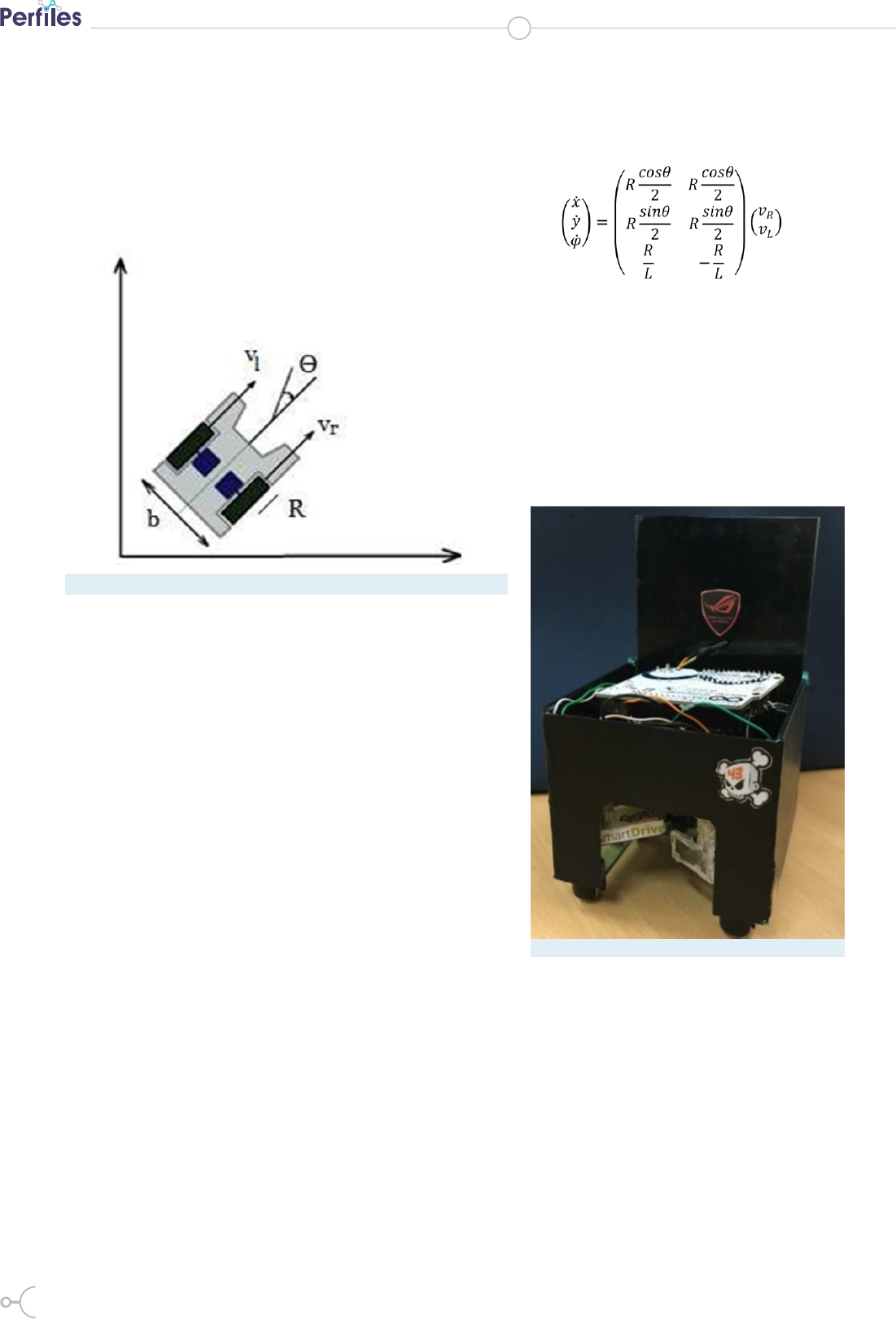
The user can send the followings commands from
the mobile application: ahead, go back, turn left, turn
right, right kick, left kick and dual kick. The mobile
device establishes the communication with the robot
by a bluetooth module. When the communications are
established, the robot starts to get commands from the
mobile application and the micro controller executes
them. This is shown in Figure 5.
Step 2. Check the distance between C2
and the boundary.
•
If it allows the robot to reach
its goal, the next step is to connect the
points C1, C2 and C3, generating the
path.
•
If it does not allow the robot to
reach the goal, then connect the point
C4, the robot and the target to generate
the path.
Soccer Robot design
The soccer robot has 4 actuators (DC
motors): 2 of them are intended to move
the robot by a mobile base, whereas the
other 2 actuators are aimed at setting the
kick. The actuators are commanded by
a driver that has been installed in the
main microcontroller. A Bluetooth mo-
dule has also been mounted on the main
board of the robot, enabling the commu-
nication with the mobile device. The ro-
bot design is composed of hardware and
software modules, which are described
in Figure 4.
Robot Movements
In order to generate the robot movements, a Tri-cycle
drive combining steering and driving has been used (5).
As the figure 6 shows (5), according to this design, each
speed motor defines the trajectory the robot will take.
Robot Operation
In order to allow the user to operate the
robot, a user application for a mobile
device has been elaborated. This appli-
cation establishes a Bluetooth connec-
tion with the mobile device. When the
connection between the robot and the
mobile is created, the robot can receive
data from the mobile application. The
data are interpreted by the microcontro-
ller, which also command the actuators
of the kicking and the mobile base.
57
Figure 6. Try-cycle drive.
Figure 4. Soccer Robot system
Figure 5: Functionality of the mobile application
The Odometry of the robot simplifies the problem in
determining the position (6) (7). In addition, the control
path is based on speed differences between the wheels.
The function of the system can be tested using numerical
values of the system. Following a differential drive, as
is shown in the figure 7, the robot is able to define it
trajectory.
Step 4. The robot kinematic
system is defined next:
Results and Discussion
Figure 8 shows the developed robot. This
prototype has been tested in various real
competitions. The mobile application
also has been tested in different mobile
devices, such as cellphones and tablets.
Tests on the robot were carried out by
It is required to comply with the 4 steps below (8) for the
differential drive (9) to be implemented:
Step 1. Based on the model of the robot, it is necessary to
set the relation between the inputs v_Land v_R and the
system X, Y and φ, where v_L stands for speed control of
the left wheel and v_R stands for speed control of right
wheel.
Step 2. Establish the robot movements, considering that
the robot can translate itself with linear speed v and rotate
with an angular speed w, which are defined by the equa-
tions below:t
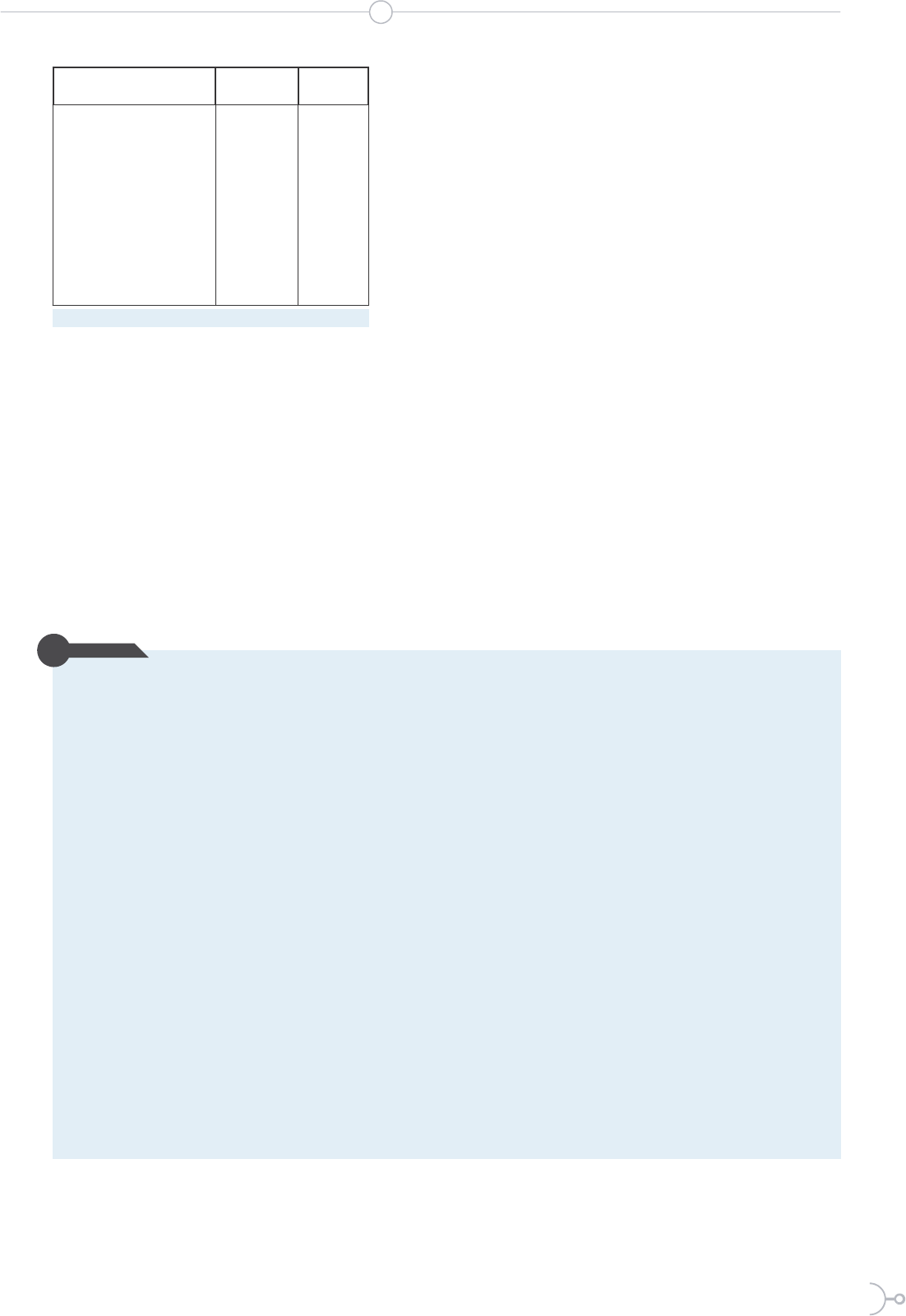
means of both the conventional and
tangential models, whose aim was
to compare the hits between them.
According to the results, the latter
model makes the robot reach a higher
percentage in scored penalty kicks than
the former. In fact, Table 1 shows that the
tangential model achieves an increase of
30% in effectiveness with respect to the
conventional model.
v=R∙[(v_L+v_R )/2]
w=R∙[(v_L+v_R )/b]
where b is the separation between both
stands for the wheel radius.
wheels and R
Step 3. Compute the Integral of v and w, in order to define
the robot dynamics, according to the following equation:
x =v∙sinθ
y =v∙cosθ
φ =w
58
Figure 8. Soccer robot prototype.
Figure 7. Robot configuration for Mobile differential model
ISSN 1390-5740 Número 15 Vol. 1 (2016)
ISSN 2477-9105
Vélez, Andrade, Guevara
This increase at the shooting angle allows the robot to get
a greater number of
fine
shots (successes), for both penalty
kicks and shots performed in the middle of the game.
Therefore, its precision improves 2 points in comparison
with a shooting without applying the tangential kick.
Finally, as it can also be seen at Table 1, the tangential
model provides the tele-operator with a broader angle
shot, thus making the robot handling and operation much
easier.
Conclusions
The kicking speed increases 0.3m/s when
the tangential algorithm is applied, while
the reception angle keeps the same value.
Another advantage for the tangential
kick is the increase of the shooting angle,
i.e. without implementing the tangential
kick the angle saturates at 75º, whereas
Implementing the tangential kick algorithm on a Soccer
Robot leads to an increase of the number of scored
goals (fine shots) during the match, hence the success
percentage moves from 40% to 70% after implementing
the tangential algorithm.
it goes up to 110º when
path algorithm is applied.
the
tangential
R
eferencias
59
1. Vladan P.: Robot Soccer, RoboCup 2009 (WISA09), 2010.
2. Arvin F., Samsudin, K., Nasseri M.: Android Mobile Phone Controlled Bluetooth Robot Using
8051 Microcontroller, International Journal of Scientific Engineering and Research (IJSER),
2014. 2(7), pp. 14-17.
3. Pahuja R., Kumar N.: Design of a Differential-Drive Wheeled Robot Controller with Pulse-
Width Modulation, 2009 Conference on Innovative Technologies in Intelligent Systems and
Industrial Applications (CITISIA 2009), pp. 143-147.
4. Yang G.: Improved Shooting Algorithm Based on Zone and Tangential Arc in Robot Soccer,
Proceedings of the 2009 International Symposium on Web Information Systems and
Applications (WISA09), pp. 267-269.
5. Goris K.: Autonomous Mobile Robot Mechanical Design, Universiteit Brussel - Thesis. 2005.
pp. 9-27,
6. Borenstein J., Feng L.: Measurement and Correction of Systematic Odometry Errors in Mobile
Robots , Invited paper for the Journal of Robotic Systems, Special Issue on Mobile Robots,14(4),
pp.231-249
7. Borenstein J., Feng L.: Mobile Robot Positioning & Sensors and Techniques, IEEE Transactions
on Robotics and Automation. 1996 12(6), pp.869-880.
8. Solaque L., Molina M., Rodríguez E.: Seguimiento de trayectorias con robot móvil de
configuración diferencial, Ing.USBMed. 2014. 5(1), pp. 26-34.
9. Ollero A.: ROBOTICA, Manipuladores y robots móviles, Marcombo.
A sample of 10 shots
Tangential
kick
Normal
kick
Shot speed with motionless
ball
Reception angle
Angle shot
Scored penalty kicks
Percentage of score penalty
kicks
Scored penalty kicks in a
game
Hits percentage in a game
1.3 m/s
90°
110°
7
70°
7
70%
1 m/s
90°
75°
5
50°
4
40%
Table 1: Results of the subjective analysis